深圳先进院在穿戴式手术机器人信息融合领域取得新进展
2018-04-21 10:35:53
先进院生物医学与健康工程研究所微创中心穿戴式手术机器人项目组在信息融合领域取得新进展,相关成果Towards Characterization and Adaptive Compensation of Backlash in a Novel Robotic Catheter System for Cardiovascular Interventions近日被国际生物医学电路与系统领域旗舰刊物IEEE Transactions on Biomedical Circuits and Systems接收,论文DOI:10.1109/TIE.2017.2764870,论文的共同第一作者是先进院博士生Olatunji Omisore和研究助理韩世鹏,通信作者是王磊研究员。该项研究得到了国家自然科学基金-深圳机器人联合基金重点支持“穿戴式精确定位介入手术机器人的力觉感知与导丝操控机理(U1713219)”、国家科技部863计划“脑血管实时介入移动式手术机器人(2015AA043203)”及中科院重点部署等项目和课题的资助,表明了先进院在穿戴式人体传感器网络领域科研工作的不断深入和科学目标的进一步拓展。
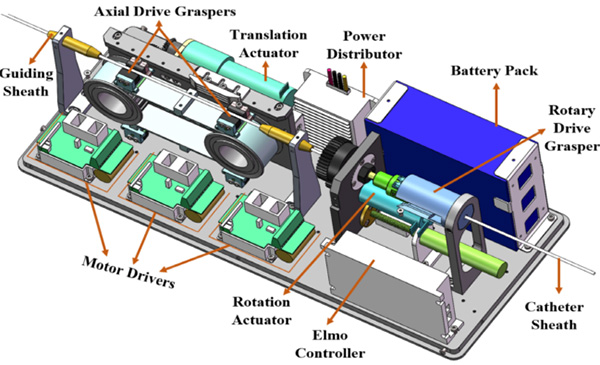
图1 介入导管导丝操控模块的总体框图
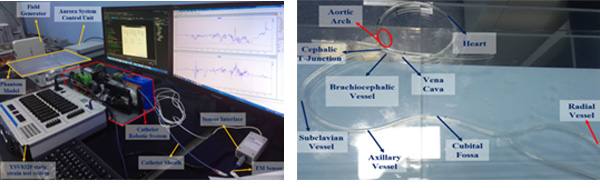
图2 实验评估系统(左:硬件系统;右:血管仿体)
供稿:微创中心 刘秋华